


























Four Robotics Trends Expanding the Need for Miniature Motors
24.06.2020
Disruptive technologies create opportunities for mini motors to solve the unique challenges of the surgical, warehouse, cobot and service robotics industries.
Advancements in automation and artificial intelligence (AI) are driving innovation in robotics, allowing them to expand into new industries with the emergence of smaller and smarter robotic designs. New developments in vision systems and sensor technologies require inventive applications for robots in the medical, warehousing, security and process automation fields. Disruptive technologies create new opportunities for miniature motors to solve the unique challenges of the robotics market, including the predictable control of surgical tools, the safe and efficient navigation through warehouses and the necessary endurance to complete lengthy security missions.
Trend 1: Mobility & Footprint
Transitioning to collaborative robotic applications requires systems to be mobile, dexterous and compact. Tasks typically handled by human hands drive the need for miniaturized motor solutions that can mimic both the size and capability of the hands used to do work. What does this mean for motion control products?
Robotic actuators require small, power-dense motors to reduce overall size and weight, especially in multiple-jointed solutions (wrist, arm, elbow, torso). Compact solutions improve usability, autonomy and safety (faster reaction time due to lower inertia). Humanoid robots, prosthetic arms, exoskeleton and robotic grippers typically have requirements for a small, high-power-density unit. Power density is the amount of power generated per unit volume of the motor. A motor generating more power in a smaller package increases power density, which is important where space is constrained or where maximum output is needed in a fixed space.
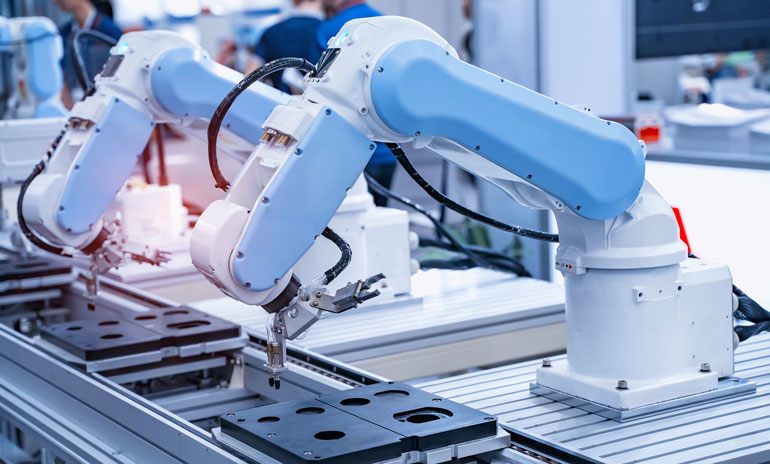
Robot arm installed on an assembly line.
High power density allows the miniaturization of mechanisms or an increased capability in current designs, which is critical to reduce the space consumed by the motion elements. Efficiency is key in getting the most power possible out of a given design with brushless DC (BLDC) motors playing an important role in size reduction over conventional DC motors. Slotless motor designs, combined with efficient planetary gearboxes, offer a powerful unit in a small package. Whether the need is for a short, flat, low-profile configuration or a long and skinny design, brushless solutions can be engineered to meet specific customer requirements.
Dexterity and agility require a dynamic response and smooth operation. Slotless BLDC motors eliminate detent torque and provide precise dynamic motion with lower inertia motors. In high dynamic applications that require constant acceleration/deceleration (such as delta robots and pick-and-place systems), high acceleration characteristics are critical. Coreless DC motors and disc magnet stepper motors, having very low inertia, making them the right solution for such applications.
High efficiency, ironless brush DC motors are the best choice for mobile, battery-powered applications to extend operational life between charges. Many robotic applications run on battery power, so they require efficient motors (up to 90%) to provide longer running time. Certain applications require high torque at lower speeds, achievable by matching the motor with a highly efficient gearbox (up to 90%). Inefficient gearbox designs negatively impact overall system efficiencies by decreasing battery operating time and increasing costs.

3D rendering of a robotic arm.
Trend 2: Robustness & Extended Life
Robot systems used in applications inhospitable to humans may need to endure difficult environmental conditions, including tremendous shock and vibrations. Motor construction plays an important role in reliability and durability. Motors with metal housings and flanges are well suited for harsh environment applications, including surveillance, inspection of industrial pipelines and sewers, power grid patrol and autonomous guided vehicles in warehousing. When under these temperature and pressure extremes and other hazardous conditions, a well-designed motor will provide additional life over standard motors.
Robots in surgical applications are required to endure repeated high-temperature and pressure cycles during the sterilization process. To match these demands, the motor design includes encapsulation of electromechanical and electronic components. The design upgrades may extend the life of the motor multiple times, allowing the surgical robot to complete many more surgeries before maintenance on the motion control is necessary.
Trend 3: Safety & Analytics
Collaborative robots, working side-by-side with humans, must operate safely and predictably when faced with an obstacle. Feedback devices, such as encoders, thermistors and current sensors, have a role in protecting the operator, the patient and the robot. High-resolution encoders provide the precision required to achieve critical positions repeatably, improving yield over the course of a work shift. Thermistors and other temperature devices alert operators when temperature limits are about to be exceeded, enabling temporary cease of operations to determine the source of the issue and complete corrections.
On the production line, a robot failure can mean lost productivity, so the analysis provided will save time and money. Precision current sensors can detect inadvertent interactions with personnel, stopping the robot quickly before any damage or harm occurs.
Many robotic systems also collect various data related to work completed as well as self-diagnosis to facilitate predictive maintenance. Thermal or force sensors integrated into motors provide real-time data to improve productivity by quickly identifying deviations in expected force levels. A higher-than-expected force required to complete the installation of a screw can alert the system to a pending issue, allowing a rapid update to the system to continue production.
Increased current consumption over time can institute predictive preventative maintenance cycles. A surgical robot would provide the details for a motor replacement to prevent unexpected stoppage during an operation.

Surgical robot.
Trend 4: Autonomy & Multi-Axis Control
The future of robotics will see the continued incorporation of autonomy and machine learning. Warehousing applications rely on faster order to ship times while autonomous vehicles relying on self-navigation and accurate information to operate safely. Light imaging, detection and ranging (LiDAR) is used to capture 3D imagery of the environment while scanning at high refresh rates and relying on high-resolution feedback with minimal latency.
Fine-pitch optical sensing systems, together with high capability interpolation processors, provide incremental position information (16 to 20 bits) in near real-time with a mechanical error in the range of 0.25 mechanical degrees. Using new sensor technologies in conjunction with the latest optimized motor designs enables innovations as to where and how autonomous vehicles can operate.
When tasks that traditionally required human intervention are replaced by automation, the robotic solution requires coordination of numerous axes of motion, and in some cases, to be guided by a vision system. Multi-axis applications, such as surgical robots, are taking advantage of serial interface communication protocols (like BiSS or SSI) that allow daisy chain connections of encoders to minimize wiring complexity.
Bulky mechanisms are streamlined by incorporating miniature motor technology coupled with advances in sensor technology containing serial interface capabilities. Encoders with serial interface communication provide absolute position information based on magnetic sensing technology, with a typical resolution of 14 bits and accuracy in the range of one mechanical degree.
Miniature Motor Types
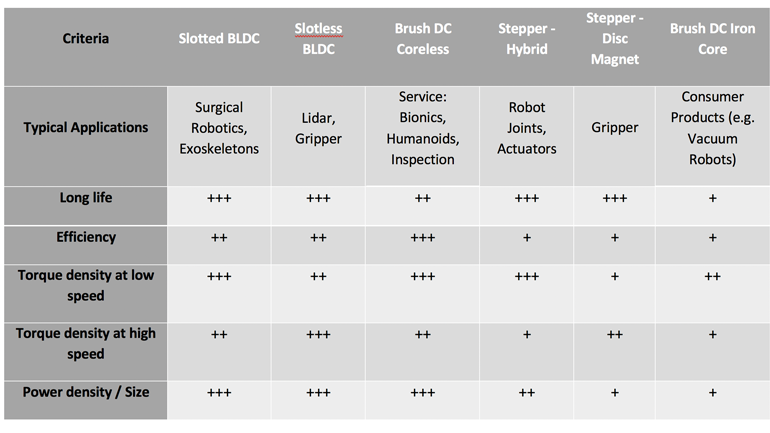
The robotics market is a big consumer of electric actuators to execute motion. Different types of motors, gearboxes and encoders are used and selected according to the application requirements, including ironless brush DC (direct current), slotted and slotless brushless DC, and stepper motors, which include can stack, hybrid and disc magnet motors. Each motor technology has benefits uniquely suited for its respective robotics applications.
Robotics Applications Suited for Miniature Motors
Miniature motors play a vital role in an ever-increasing number of robotic applications requiring small, yet powerful and efficient, motion solutions. Miniaturization involves careful consideration of the type of motor or actuator used, how it fits within the mechanical elements and how it delivers power to and captures feedback from the devices.
Service robots. Robotic applications are taking on new roles in unmanned inspection, security and patrolling in operating environments that are not safe for humans or are highly repetitive. These systems go well beyond just providing the stationary cameras and alarm systems of the past. Typical uses include surveillance and inspection of industrial pipelines and sewers, power grid patrol and autonomous guided vehicles in warehousing.
Coreless brush DC and brushless DC motors, along with their complementary gearboxes and encoders, are the ideal motion solution to provide high torque and extended battery operating time in a lightweight package.

A robotic arm installed for a warehouse application.
LiDAR. LiDAR technology enables machines to access the current environmental conditions in 3D, develop a response and then navigate the situation. Machines using LiDAR range from small service robots to large autonomous vehicles, with the ideal LiDAR system being compact, lightweight, precise and cost-effective. Customers prefer flat motor configurations for compactness and minimum weight and medium- to high-resolution encoders for precision feedback.
Electric grippers. During the last decade, the conversion from pneumatic to electric technology in industrial gripping has gained popularity since electric grippers allow better control of the gripper finger position, grip detection and control of the grip force and speed.
Slotless brushless DC motors, along with their complementary gearboxes and encoders, offer the high-power density, low inertia, high precision and low weight needed to meet application requirements.
Surgical robotics. Surgical robot applications have unique requirements regarding compact size, low weight, high power density and sterilization. While not all motors within a surgical robotic system require a sterilizable solution, other requirements may focus on the robustness and durability of the motor, such as in autoclave applications. In these applications, electronics (stator and commutation electronics) are fully encapsulated in a thermoset epoxy, ensuring the high temperatures and pressures encountered in the steam autoclave environment do not adversely affect the electronics.
Within the growing field of surgical robots, a high degree of variability makes it infeasible to create a single solution for all customer applications. Even within the customer’s system, there may be distinct differences in the types of motors that are articulating the various axes or driving end effectors. These unique specifications require highly customizable solutions (both electrically and mechanically) to meet the needs of the customer’s robotic system.
Customizing the design for a customer application ensures the performance goals are met within a defined package size. By understanding the constraining load points, a solution can be developed that meets the optimum torque and speed balance in the most compact and lightweight design possible.